非极大值抑制¶
在实际的目标检测过程中,不管是用什么方式获取候选区域,都会存在一个通用的问题,那就是网络对同一个目标可能会进行多次检测。这也就导致对于同一个物体,会产生多个预测框。因此需要消除重叠较大的冗余预测框。具体的处理方法就是非极大值抑制(NMS)。
假设使用模型对图片进行预测,一共输出了11个预测框及其得分,在图上画出预测框如 图1 所示。在每个人像周围,都出现了多个预测框,需要消除冗余的预测框以得到最终的预测结果。

图1 预测框示意图
输出11个预测框及其得分的代码实现如下:
# 画图展示目标物体边界框
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from matplotlib.image import imread
import math
# 定义画矩形框的程序
def draw_rectangle(currentAxis, bbox, edgecolor = 'k', facecolor = 'y', fill=False, linestyle='-'):
# currentAxis,坐标轴,通过plt.gca()获取
# bbox,边界框,包含四个数值的list, [x1, y1, x2, y2]
# edgecolor,边框线条颜色
# facecolor,填充颜色
# fill, 是否填充
# linestype,边框线型
# patches.Rectangle(xy, width, height,linewidth,edgecolor,facecolor,fill, linestyle)
# xy:左下角坐标; width:矩形框的宽; height:矩形框的高; linewidth:线宽; edgecolor:边界颜色; facecolor:填充颜色; fill:是否填充; linestyle:线断类型
rect=patches.Rectangle((bbox[0], bbox[1]), bbox[2]-bbox[0]+1, bbox[3]-bbox[1]+1, linewidth=1,
edgecolor=edgecolor,facecolor=facecolor,fill=fill, linestyle=linestyle)
currentAxis.add_patch(rect)
plt.figure(figsize=(10, 10))
# 传入图片路径
filename = '/home/aistudio/work/images/section3/000000086956.jpg'
im = imread(filename)
plt.imshow(im)
currentAxis=plt.gca()
# 预测框位置,由网络预测得到
boxes = np.array([[4.21716537e+01, 1.28230896e+02, 2.26547668e+02, 6.00434631e+02],
[3.18562988e+02, 1.23168472e+02, 4.79000000e+02, 6.05688416e+02],
[2.62704697e+01, 1.39430557e+02, 2.20587097e+02, 6.38959656e+02],
[4.24965363e+01, 1.42706665e+02, 2.25955185e+02, 6.35671204e+02],
[2.37462646e+02, 1.35731537e+02, 4.79000000e+02, 6.31451294e+02],
[3.19390472e+02, 1.29295090e+02, 4.79000000e+02, 6.33003845e+02],
[3.28933838e+02, 1.22736115e+02, 4.79000000e+02, 6.39000000e+02],
[4.44292603e+01, 1.70438187e+02, 2.26841858e+02, 6.39000000e+02],
[2.17988785e+02, 3.02472412e+02, 4.06062927e+02, 6.29106628e+02],
[2.00241089e+02, 3.23755096e+02, 3.96929321e+02, 6.36386108e+02],
[2.14310303e+02, 3.23443665e+02, 4.06732849e+02, 6.35775269e+02]])
# 预测框得分,由网络预测得到
scores = np.array([0.5247661 , 0.51759845, 0.86075854, 0.9910175 , 0.39170712,
0.9297706 , 0.5115228 , 0.270992 , 0.19087596, 0.64201415, 0.879036])
# 画出所有预测框
for box in boxes:
draw_rectangle(currentAxis, box)
这里使用非极大值抑制(Non-Maximum Suppression, NMS)来消除冗余框。基本思想是,如果有多个预测框都对应同一个物体,则只选出得分最高的那个预测框,剩下的预测框被丢弃掉。
如何判断两个预测框对应的是同一个物体呢,标准该怎么设置?
如果两个预测框的类别一样,而且他们的位置重合度比较大,则可以认为他们是在预测同一个目标。非极大值抑制的做法是,选出某个类别得分最高的预测框,然后看哪些预测框跟它的IoU大于阈值,就把这些预测框给丢弃掉。这里IoU的阈值是超参数,需要提前设置,这里我们参考YOLOv3算法,里面设置的是0.5。
比如在上面的程序中,boxes里面一共对应11个预测框,scores给出了它们预测”人”这一类别的得分,NMS的具体做法如下。
Step0:创建选中列表,keep_list = []
Step1:对得分进行排序,remain_list = [ 3, 5, 10, 2, 9, 0, 1, 6, 4, 7, 8],
Step2:选出boxes[3],此时keep_list为空,不需要计算IoU,直接将其放入keep_list,keep_list = [3], remain_list=[5, 10, 2, 9, 0, 1, 6, 4, 7, 8]
Step3:选出boxes[5],此时keep_list中已经存在boxes[3],计算出IoU(boxes[3], boxes[5]) = 0.0,显然小于阈值,则keep_list=[3, 5], remain_list = [10, 2, 9, 0, 1, 6, 4, 7, 8]
Step4:选出boxes[10],此时keep_list=[3, 5],计算IoU(boxes[3], boxes[10])=0.0268,IoU(boxes[5], boxes[10])=0.0268 = 0.24,都小于阈值,则keep_list = [3, 5, 10],remain_list=[2, 9, 0, 1, 6, 4, 7, 8]
Step5:选出boxes[2],此时keep_list = [3, 5, 10],计算IoU(boxes[3], boxes[2]) = 0.88,超过了阈值,直接将boxes[2]丢弃,keep_list=[3, 5, 10],remain_list=[9, 0, 1, 6, 4, 7, 8]
Step6:选出boxes[9],此时keep_list = [3, 5, 10],计算IoU(boxes[3], boxes[9]) = 0.0577,IoU(boxes[5], boxes[9]) = 0.205,IoU(boxes[10], boxes[9]) = 0.88,超过了阈值,将boxes[9]丢弃掉。keep_list=[3, 5, 10],remain_list=[0, 1, 6, 4, 7, 8]
Step7:重复上述Step6直到remain_list为空。
非极大值抑制的具体实现代码如下面的nms函数的定义。
# 非极大值抑制
def nms(bboxes, scores, score_thresh, nms_thresh):
"""
nms
"""
inds = np.argsort(scores)
inds = inds[::-1]
keep_inds = []
while(len(inds) > 0):
cur_ind = inds[0]
cur_score = scores[cur_ind]
# if score of the box is less than score_thresh, just drop it
if cur_score < score_thresh:
break
keep = True
for ind in keep_inds:
current_box = bboxes[cur_ind]
remain_box = bboxes[ind]
iou = box_iou_xyxy(current_box, remain_box)
if iou > nms_thresh:
keep = False
break
if keep:
keep_inds.append(cur_ind)
inds = inds[1:]
return np.array(keep_inds)
最终得到keep_list=[3, 5, 10],也就是预测框3、5、10被最终挑选出来了,如 图2 所示。
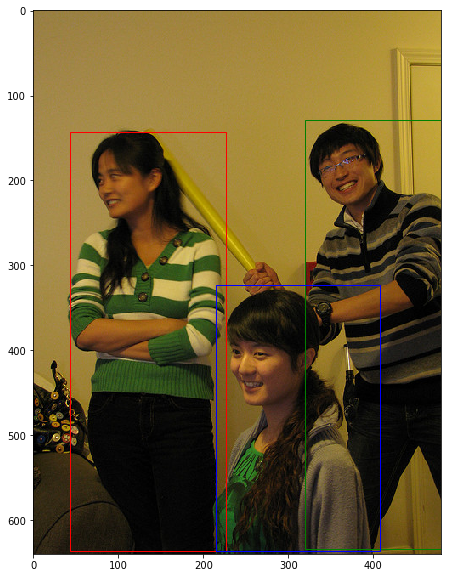
图2 NMS结果示意图
整个过程的实现代码如下:
# 画图展示目标物体边界框
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from matplotlib.image import imread
import math
# 定义画矩形框的程序
def draw_rectangle(currentAxis, bbox, edgecolor = 'k', facecolor = 'y', fill=False, linestyle='-'):
# currentAxis,坐标轴,通过plt.gca()获取
# bbox,边界框,包含四个数值的list, [x1, y1, x2, y2]
# edgecolor,边框线条颜色
# facecolor,填充颜色
# fill, 是否填充
# linestype,边框线型
# patches.Rectangle需要传入左上角坐标、矩形区域的宽度、高度等参数
rect=patches.Rectangle((bbox[0], bbox[1]), bbox[2]-bbox[0]+1, bbox[3]-bbox[1]+1, linewidth=1,
edgecolor=edgecolor,facecolor=facecolor,fill=fill, linestyle=linestyle)
currentAxis.add_patch(rect)
plt.figure(figsize=(10, 10))
filename = '/home/aistudio/work/images/section3/000000086956.jpg'
im = imread(filename)
plt.imshow(im)
currentAxis=plt.gca()
boxes = np.array([[4.21716537e+01, 1.28230896e+02, 2.26547668e+02, 6.00434631e+02],
[3.18562988e+02, 1.23168472e+02, 4.79000000e+02, 6.05688416e+02],
[2.62704697e+01, 1.39430557e+02, 2.20587097e+02, 6.38959656e+02],
[4.24965363e+01, 1.42706665e+02, 2.25955185e+02, 6.35671204e+02],
[2.37462646e+02, 1.35731537e+02, 4.79000000e+02, 6.31451294e+02],
[3.19390472e+02, 1.29295090e+02, 4.79000000e+02, 6.33003845e+02],
[3.28933838e+02, 1.22736115e+02, 4.79000000e+02, 6.39000000e+02],
[4.44292603e+01, 1.70438187e+02, 2.26841858e+02, 6.39000000e+02],
[2.17988785e+02, 3.02472412e+02, 4.06062927e+02, 6.29106628e+02],
[2.00241089e+02, 3.23755096e+02, 3.96929321e+02, 6.36386108e+02],
[2.14310303e+02, 3.23443665e+02, 4.06732849e+02, 6.35775269e+02]])
scores = np.array([0.5247661 , 0.51759845, 0.86075854, 0.9910175 , 0.39170712,
0.9297706 , 0.5115228 , 0.270992 , 0.19087596, 0.64201415, 0.879036])
left_ind = np.where((boxes[:, 0]<60) * (boxes[:, 0]>20))
left_boxes = boxes[left_ind]
left_scores = scores[left_ind]
colors = ['r', 'g', 'b', 'k']
# 画出最终保留的预测框
inds = nms(boxes, scores, score_thresh=0.01, nms_thresh=0.5)
# 打印最终保留的预测框是哪几个
print(inds)
for i in range(len(inds)):
box = boxes[inds[i]]
draw_rectangle(currentAxis, box, edgecolor=colors[i])
需要说明的是当数据集中含有多个类别的物体时,需要做多分类非极大值抑制,其实现原理与非极大值抑制相同,区别在于需要对每个类别都做非极大值抑制,实现代码如下面的multiclass_nms所示。
# 多分类非极大值抑制
def multiclass_nms(bboxes, scores, score_thresh=0.01, nms_thresh=0.45, pre_nms_topk=1000, pos_nms_topk=100):
"""
This is for multiclass_nms
"""
batch_size = bboxes.shape[0]
class_num = scores.shape[1]
rets = []
for i in range(batch_size):
bboxes_i = bboxes[i]
scores_i = scores[i]
ret = []
# 对每个类别都进行NMS操作
for c in range(class_num):
scores_i_c = scores_i[c]
keep_inds = nms(bboxes_i, scores_i_c, score_thresh, nms_thresh)
if len(keep_inds) < 1:
continue
keep_bboxes = bboxes_i[keep_inds]
keep_scores = scores_i_c[keep_inds]
keep_results = np.zeros([keep_scores.shape[0], 6])
keep_results[:, 0] = c
keep_results[:, 1] = keep_scores[:]
keep_results[:, 2:6] = keep_bboxes[:, :]
ret.append(keep_results)
if len(ret) < 1:
rets.append(ret)
continue
ret_i = np.concatenate(ret, axis=0)
scores_i = ret_i[:, 1]
if len(scores_i) > pos_nms_topk:
inds = np.argsort(scores_i)[::-1]
inds = inds[:pos_nms_topk]
ret_i = ret_i[inds]
rets.append(ret_i)
return rets