VGG¶
模型介绍¶
随着AlexNet在2012年的ImageNet大赛上大放异彩后,卷积神经网络进入了飞速发展的阶段。2014年,由Simonyan和Zisserman提出的VGG[1]网络在ImageNet上取得了亚军的成绩。VGG的命名来源于论文作者所在的实验室Visual Geometry Group,其对卷积神经网络进行了改良,探索了网络深度与性能的关系,用更小的卷积核和更深的网络结构,取得了较好的效果,成为了CNN发展史上较为重要的一个网络。VGG中使用了一系列大小为3x3的小尺寸卷积核和池化层构造深度卷积神经网络,因为其结构简单、应用性极强而广受研究者欢迎,尤其是它的网络结构设计方法,为构建深度神经网络提供了方向。
模型结构¶
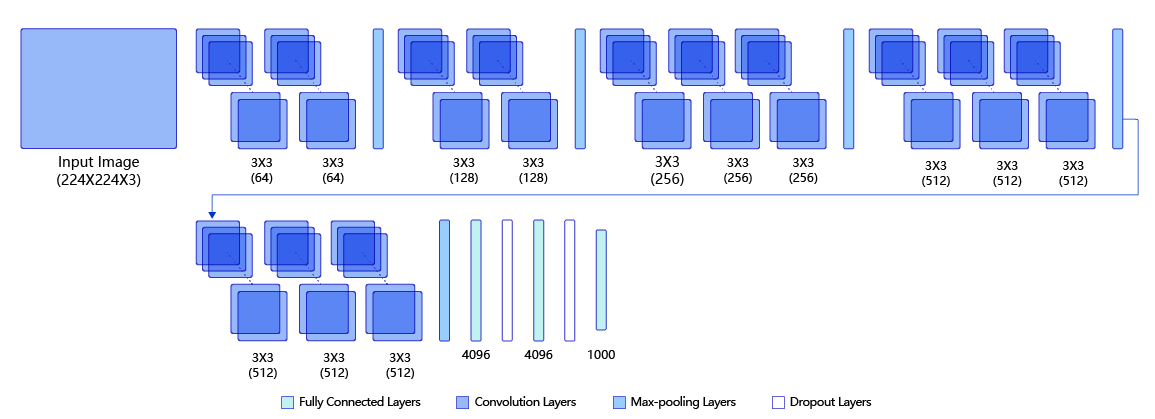
图1 是VGG-16的网络结构示意图,有13层卷积和3层全连接层。VGG网络的设计严格使用\(3\times 3\)的卷积层和池化层来提取特征,并在网络的最后面使用三层全连接层,将最后一层全连接层的输出作为分类的预测。
VGG中还有一个显著特点:每次经过池化层(maxpooling)后特征图的尺寸减小一倍,而通道数增加一倍(最后一个池化层除外)。
在VGG中每层卷积将使用ReLU作为激活函数,在全连接层之后添加dropout来抑制过拟合。使用小的卷积核能够有效地减少参数的个数,使得训练和测试变得更加有效。比如使用两层\(3\times 3\) 卷积层,可以得到感受野为5的特征图,而比使用\(5 \times 5\)的卷积层需要更少的参数。由于卷积核比较小,可以堆叠更多的卷积层,加深网络的深度,这对于图像分类任务来说是有利的。VGG模型的成功证明了增加网络的深度,可以更好的学习图像中的特征模式。
模型实现¶
基于Paddle框架,VGG的具体实现如下代码所示:
# -*- coding:utf-8 -*-
# VGG模型代码
import numpy as np
import paddle
# from paddle.nn import Conv2D, MaxPool2D, BatchNorm, Linear
from paddle.nn import Conv2D, MaxPool2D, BatchNorm2D, Linear
# 定义vgg网络
class VGG(paddle.nn.Layer):
def __init__(self):
super(VGG, self).__init__()
in_channels = [3, 64, 128, 256, 512, 512]
# 定义第一个卷积块,包含两个卷积
self.conv1_1 = Conv2D(in_channels=in_channels[0], out_channels=in_channels[1], kernel_size=3, padding=1, stride=1)
self.conv1_2 = Conv2D(in_channels=in_channels[1], out_channels=in_channels[1], kernel_size=3, padding=1, stride=1)
# 定义第二个卷积块,包含两个卷积
self.conv2_1 = Conv2D(in_channels=in_channels[1], out_channels=in_channels[2], kernel_size=3, padding=1, stride=1)
self.conv2_2 = Conv2D(in_channels=in_channels[2], out_channels=in_channels[2], kernel_size=3, padding=1, stride=1)
# 定义第三个卷积块,包含三个卷积
self.conv3_1 = Conv2D(in_channels=in_channels[2], out_channels=in_channels[3], kernel_size=3, padding=1, stride=1)
self.conv3_2 = Conv2D(in_channels=in_channels[3], out_channels=in_channels[3], kernel_size=3, padding=1, stride=1)
self.conv3_3 = Conv2D(in_channels=in_channels[3], out_channels=in_channels[3], kernel_size=3, padding=1, stride=1)
# 定义第四个卷积块,包含三个卷积
self.conv4_1 = Conv2D(in_channels=in_channels[3], out_channels=in_channels[4], kernel_size=3, padding=1, stride=1)
self.conv4_2 = Conv2D(in_channels=in_channels[4], out_channels=in_channels[4], kernel_size=3, padding=1, stride=1)
self.conv4_3 = Conv2D(in_channels=in_channels[4], out_channels=in_channels[4], kernel_size=3, padding=1, stride=1)
# 定义第五个卷积块,包含三个卷积
self.conv5_1 = Conv2D(in_channels=in_channels[4], out_channels=in_channels[5], kernel_size=3, padding=1, stride=1)
self.conv5_2 = Conv2D(in_channels=in_channels[5], out_channels=in_channels[5], kernel_size=3, padding=1, stride=1)
self.conv5_3 = Conv2D(in_channels=in_channels[5], out_channels=in_channels[5], kernel_size=3, padding=1, stride=1)
# 使用Sequential 将全连接层和relu组成一个线性结构(fc + relu)
# 当输入为224x224时,经过五个卷积块和池化层后,特征维度变为[512x7x7]
self.fc1 = paddle.nn.Sequential(paddle.nn.Linear(512 * 7 * 7, 4096), paddle.nn.ReLU())
self.drop1_ratio = 0.5
self.dropout1 = paddle.nn.Dropout(self.drop1_ratio, mode='upscale_in_train')
# 使用Sequential 将全连接层和relu组成一个线性结构(fc + relu)
self.fc2 = paddle.nn.Sequential(paddle.nn.Linear(4096, 4096), paddle.nn.ReLU())
self.drop2_ratio = 0.5
self.dropout2 = paddle.nn.Dropout(self.drop2_ratio, mode='upscale_in_train')
self.fc3 = paddle.nn.Linear(4096, 1)
self.relu = paddle.nn.ReLU()
self.pool = MaxPool2D(stride=2, kernel_size=2)
def forward(self, x):
x = self.relu(self.conv1_1(x))
x = self.relu(self.conv1_2(x))
x = self.pool(x)
x = self.relu(self.conv2_1(x))
x = self.relu(self.conv2_2(x))
x = self.pool(x)
x = self.relu(self.conv3_1(x))
x = self.relu(self.conv3_2(x))
x = self.relu(self.conv3_3(x))
x = self.pool(x)
x = self.relu(self.conv4_1(x))
x = self.relu(self.conv4_2(x))
x = self.relu(self.conv4_3(x))
x = self.pool(x)
x = self.relu(self.conv5_1(x))
x = self.relu(self.conv5_2(x))
x = self.relu(self.conv5_3(x))
x = self.pool(x)
x = paddle.flatten(x, 1, -1)
x = self.dropout1(self.relu(self.fc1(x)))
x = self.dropout2(self.relu(self.fc2(x)))
x = self.fc3(x)
return x
模型特点¶
整个网络都使用了同样大小的卷积核尺寸\(3\times3\)和最大池化尺寸\(2\times2\)。
\(1\times1\)卷积的意义主要在于线性变换,而输入通道数和输出通道数不变,没有发生降维。
两个\(3\times3\)的卷积层串联相当于1个\(5\times5\)的卷积层,感受野大小为\(5\times5\)。同样地,3个\(3\times3\)的卷积层串联的效果则相当于1个\(7\times7\)的卷积层。这样的连接方式使得网络参数量更小,而且多层的激活函数令网络对特征的学习能力更强。
VGGNet在训练时有一个小技巧,先训练浅层的的简单网络VGG11,再复用VGG11的权重来初始化VGG13,如此反复训练并初始化VGG19,能够使训练时收敛的速度更快。
在训练过程中使用多尺度的变换对原始数据做数据增强,使得模型不易过拟合。
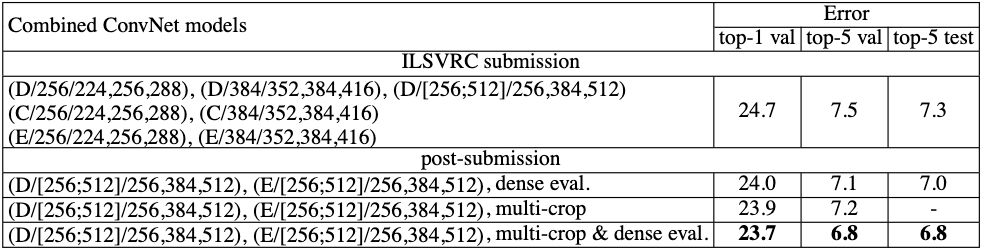
模型指标¶
VGG 在 2014 年的 ImageNet 比赛上取得了亚军的好成绩,具体指标如 图2 所示。图2 第一行为在 ImageNet 比赛中的指标,测试集的Error rate达到了7.3%,在论文中,作者对算法又进行了一定的优化,最终可以达到 6.8% 的Error rate。